
Robôs semelhantes a cães são uma área importante separada da robótica, e os engenheiros da Escola Politécnica Federal de Lausanne (Suíça) conseguiram dizer uma palavra nova aqui. O robô experimental que eles construíram continua a se mover na esteira mesmo com os motores desligados – ele tem contrapeso suficiente.
Fonte da imagem: actu.epfl.ch
O projeto foi criado pelo estudante canadense de robótica Mickaël Achkar e baseado em dados de captura de movimento de cães reais. Utilizando o método de componentes principais, os dados foram agrupados em diversos vetores que descrevem os principais eixos de movimento do cão, e isso serviu de base para o projeto do mecanismo.
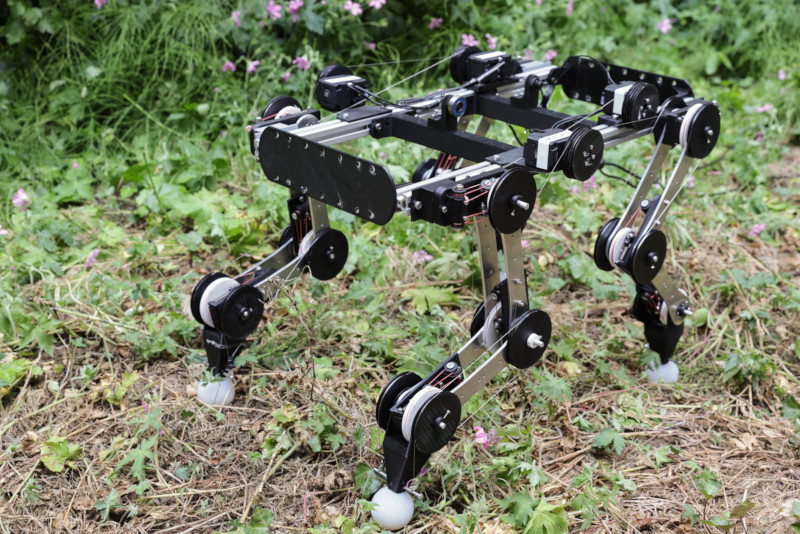
O design do robô é simétrico em relação ao eixo longitudinal. Os ossos dos membros foram substituídos por hastes de metal, as articulações foram substituídas por blocos de polímero impressos em 3D e os tendões foram substituídos por finos cabos de aço. Cada uma das quatro pernas da máquina possui três articulações, como um cachorro de verdade, e cada uma delas é mecanicamente combinada com as outras.
No primeiro teste da máquina, os participantes do projeto tiveram uma surpresa: assim que os acionamentos do robô foram acionados, ele continuou a se mover sozinho, sem apoio dos motores, e o único componente necessário para manter o movimento era o operação da esteira. O robô está equipado com motores que movem cada perna, mas esses motores podem ser desligados.
«A princípio pensamos que foi um acidente. Portanto, alteramos um pouco o design e testamos o robô novamente – e ele não funcionou mais”, disse o autor do projeto. Para que o aparelho continuasse se movendo, foi fixado em suas costas um contrapeso semelhante a um pêndulo, projetado para suportar a corrida. Esta, claro, não é uma máquina de movimento perpétuo: para saltar e superar obstáculos, não pode prescindir de impulsos.
«Nosso objetivo não é competir com robôs caninos de alta tecnologia, mas sim explorar projetos de robôs baseados em protótipos biológicos. Isto implica aperfeiçoar o design fundamental do robô e alterar as suas propriedades passivas de tal forma que apenas sejam necessários sistemas de controlo simples – ao mesmo tempo que expande as capacidades do robô tanto quanto possível. O que fizemos aqui – projetar articulações para funcionarem em conjunto – já se mostrou útil para criar braços robóticos e outras partes do corpo”, concluiu Mikael Ashkar.