
Um grupo de cientistas da Universidade de Tóquio usou tecido muscular cultivado artificialmente como motor para mover um robô bípede. Tal impulso poderia ser mais eficiente do que outros métodos de movimentação de membros robóticos. Além disso, será suave ao toque e poderá copiar facilmente a forma como as pessoas se movem. Ou seja, estará adaptado para viver rodeado de humanos.
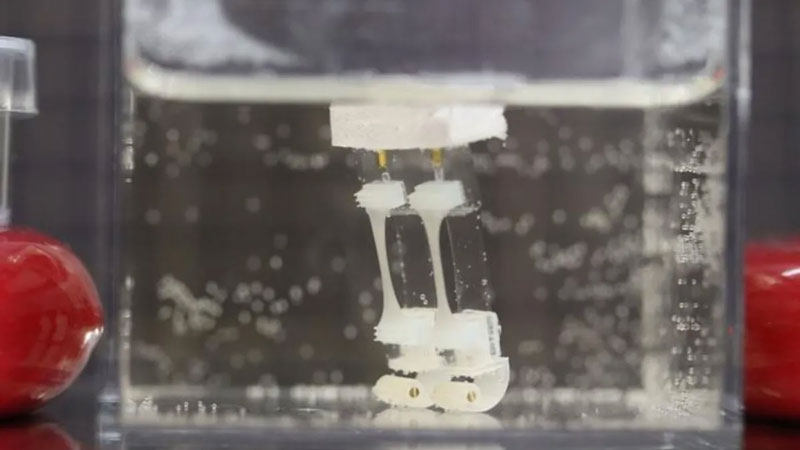
Fonte da imagem: grupo de pesquisa Shoji Takeuchi, Universidade de Tóquio
O desenho experimental não foi complexo. O tecido muscular foi esticado ao longo da estrutura flexível de cada uma das pernas plásticas do robô. As pernas terminavam em flutuação e toda a estrutura era colocada em um recipiente com solução nutritiva. As células musculares, embora artificiais, estão vivas e, portanto, necessitam de uma fonte de energia.
A contração muscular ocorreu após a passagem de corrente através do fluido próximo aos músculos, de um eletrodo para outro. Os cientistas aproximaram manualmente os eletrodos de uma perna e depois da outra, forçando-os a se levantar e dar um passo à frente. Desligar a corrente relaxou os músculos e a perna se moveu. Assim, foram testados os modos de caminhar em linha reta e girar no local, quando apenas um músculo de uma ou outra perna se contraía.
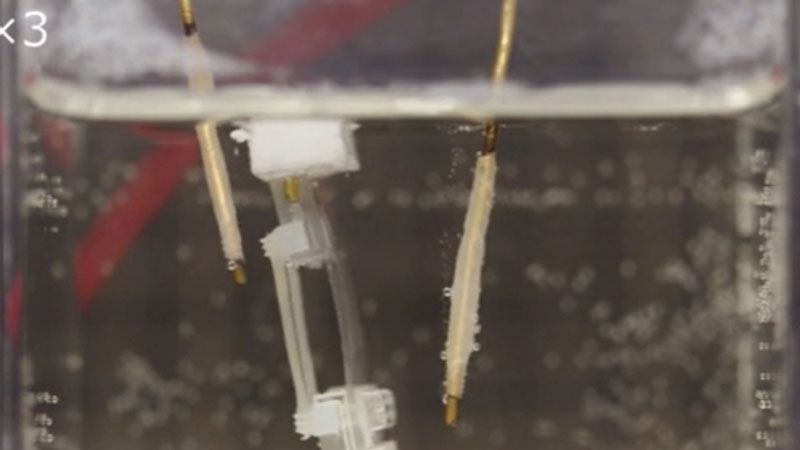
Eletrodos trazidos para a perna do robô através dos quais a corrente passa pelo fluido e pelo músculo
Os cientistas notaram que a solução proposta funciona e que o robô com músculos vivos é capaz de se mover e manobrar no solo. No futuro, eles planejam desenvolver dispositivos para fornecer energia aos músculos para que possam trabalhar no ar, bem como circuitos eficientes para fornecer sinais elétricos para controlar o movimento.
Não há dúvida de que os pesquisadores encontrarão uma solução conveniente. Anteriormente, dissemos, por exemplo, que os cientistas japoneses foram capazes de ensinar robôs a desenvolver pele a partir de células humanas vivas, embora isso seja outra história.