
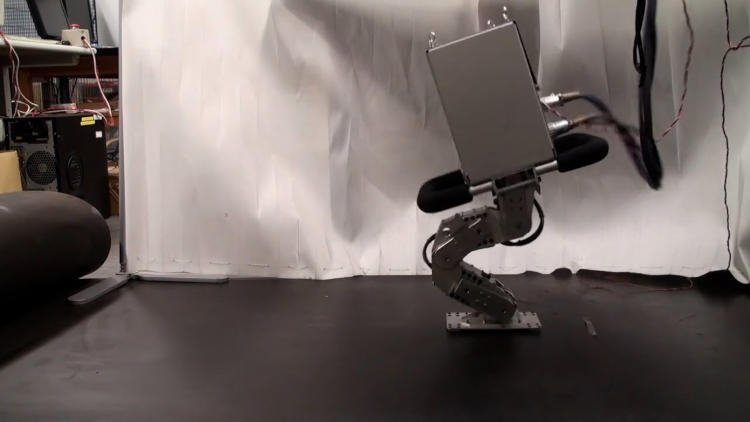
Cientistas do Toyota Institute of Technology em Nagoya, Japão, construíram o TTI Hopper, um robô de uma perna capaz de ficar em pé, pular e se equilibrar em superfícies oscilantes. A máquina é construída com os componentes mais simples e baratos que custam menos de US $ 1.000. Um recurso importante de desenvolvimento é um algoritmo exclusivo que compensa os recursos limitados do robô.
Fonte: youtube.com
«Na robótica, costumamos usar componentes hidráulicos porque eles podem ser acionados rapidamente. Ou acionamentos elétricos com um sistema de mola especial ou um medidor de tensão para medir as forças internas. Em vez disso, usamos motores DC com engrenagens. Apenas medimos o ângulo na articulação e também usamos um sensor de força barato no pé ”, comentou Barkan Uğurlu, agora professor assistente no Departamento de Engenharia Mecânica da Universidade Ozegin em Istambul.
O algoritmo força as articulações a dobrarem quando é necessário absorver um choque e as desdobra se for necessário para se mover. Isso permite que a máquina permaneça na posição vertical em circunstâncias difíceis, como quando uma inclinação se torna acentuadamente horizontal. A “capacidade de adaptação à paisagem” resultante não é nova, disse Ugurlu, mas ele e seus colegas conseguiram provar matematicamente que seu algoritmo garante o equilíbrio do robô ao se inclinar e se mover durante os experimentos. Para fazer isso, eles calcularam as forças verticais e horizontais dos motores e da gravidade, que o algoritmo produz na perna robótica. Verificou-se que o funil TTI mantém o equilíbrio quando a superfície é inclinada até 9 °.
Agora, Ugurlu, com base nesse projeto, está desenvolvendo um exoesqueleto de duas pernas para pessoas cujas pernas foram imobilizadas. “Os exoesqueletos comercialmente disponíveis não têm a capacidade de se equilibrar. Eles movem as pernas, mas o equilíbrio requer o uso da parte superior do corpo e muletas. Minha ideia é usar a capacidade de me adaptar à paisagem e me livrar das muletas ”, concluiu o cientista.