
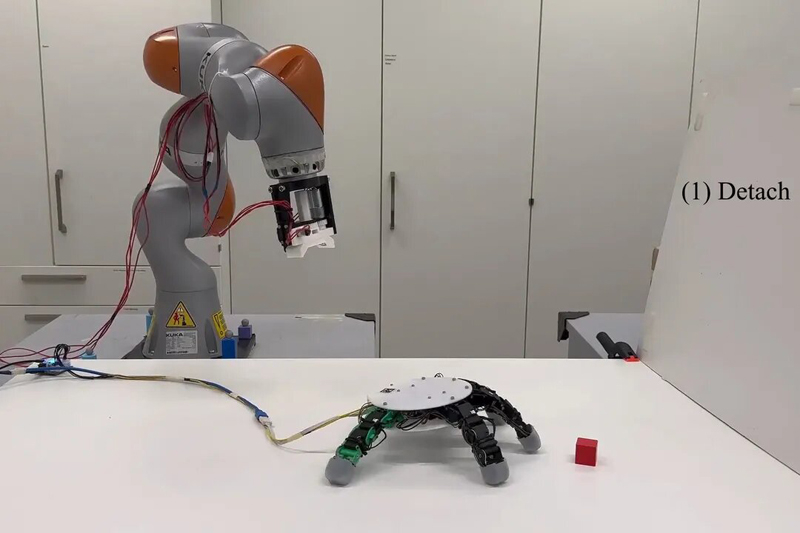
Desenvolvedores da École Polytechnique Federale de Lausanne (EPFL, Suíça) apresentaram na Conferência Internacional sobre Robótica e Automação (ICRA) um braço robótico articulado que pode ampliar seu alcance destacando-se e movendo-se de forma independente em direção a um objeto para pegá-lo.
Fonte da imagem: EPFL
Os braços robóticos são normalmente fixados a uma base no chão ou outra estrutura para maior estabilidade, o que limita seu alcance. O objetivo da pesquisa, conduzida no Laboratório de Algoritmos e Sistemas de Aprendizagem (LASA) da EPFL, era desenvolver um braço robótico bimodal com capacidades de preensão aprimoradas, incluindo independência periódica do braço ao qual está conectado.
Robohands geralmente são criados com um propósito: segurar e mover objetos. Para desenvolver um braço robótico que pudesse fazer isso enquanto se movia sozinho, os pesquisadores geraram e refinaram o projeto básico usando um algoritmo genético que se baseia na biologia e no simulador de física MuJoCo para testar a funcionalidade do protótipo.
Os pesquisadores determinaram a posição ideal e o número de dedos articulados necessários – há cinco deles, como os de um ser humano. Os dedos da mão podem dobrar em duas direções, o que permite não apenas “rastejar”, mas também agarrar dois objetos ao mesmo tempo, enquanto está preso ao membro de um manipulador robótico. Ela também pode usar vários dedos para levantar objetos enquanto os outros funcionam como apoio.
O braço robótico também possui um suporte magnético para o pulso. Se você adicionar um braço robótico articulado, por exemplo, ao robô Spot, ele poderá ser usado para explorar ou analisar áreas que estão atualmente inacessíveis devido ao seu tamanho e capacidade de manobra limitada.