
Para o movimento em terrenos acidentados, os robôs bípedes e quadrúpedes são considerados uma direção promissora, mas eles precisam ser equipados com conjuntos de sensores e criar algoritmos bastante complexos para manter a estabilidade. Cientistas do Instituto de Tecnologia da Geórgia (EUA) propuseram uma abordagem mais simples – um robô de várias pernas, geralmente desprovido de sensores.
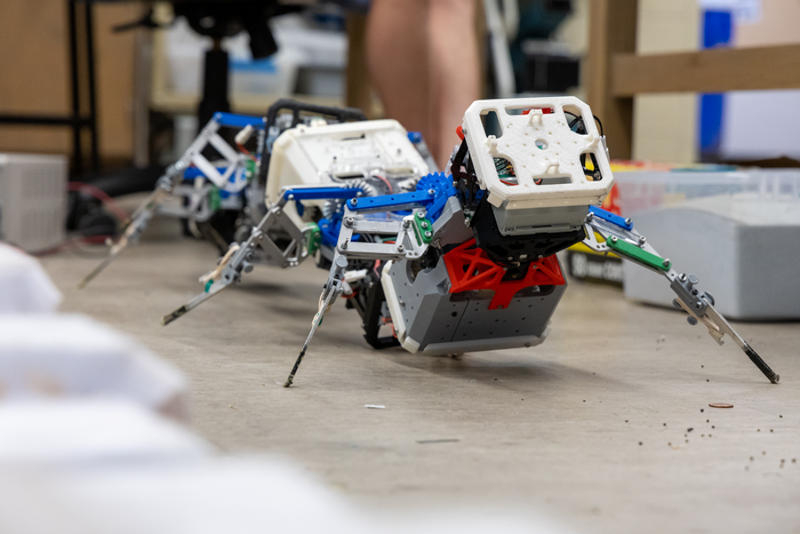
Fonte da imagem: Georgia Tech
A inspiração para o projeto foi a teoria matemática da comunicação – já em 1948, o matemático americano Claude Shannon publicou um artigo de mesmo nome. Ele sugeriu que, para transmitir uma mensagem em um canal de comunicação ruidoso, essa mensagem deveria ser dividida em fragmentos repetidos com informações redundantes. No caso de um robô, esses fragmentos são suas pernas. O aluno de pós-graduação Juntao He e o aluno de pós-graduação Daniel Soto originalmente incorporaram essa teoria na forma de um robô de seis pernas encarregado de atravessar terrenos acidentados que simulavam condições naturais difíceis.
Após cada tentativa, eles adicionaram pares de pernas adicionais ao robô até que o número de pernas chegasse a dezesseis. Os cientistas constataram que, à medida que seu número crescia, o robô agia melhor, ou seja, superava os obstáculos com mais eficiência. E, o mais importante, nenhum sensor ou algoritmo de software adaptativo foi usado. Os autores do projeto simplesmente partiram do pressuposto de que, se uma ou mais pernas tropeçarem, o movimento será continuado por muitas outras.
A economia de sensores e o desenvolvimento de algoritmos complexos com essa abordagem serão, mais cedo ou mais tarde, superados pelo custo de adicionar outro par de pernas; portanto, os cientistas ainda precisam determinar onde essa linha passa para diferentes robôs que executam tarefas específicas. Eles terão que encontrar um compromisso levando em consideração critérios como energia, velocidade, potência e confiabilidade em um sistema complexo. Na prática, a tecnologia será testada no setor agrícola para controle de ervas daninhas.