
Um grupo de cientistas dos Estados Unidos publicou um artigo na revista Science Robotics descrevendo um robô saltador. Ela é capaz de pular de galho em galho e pode ser usada na construção civil ou na silvicultura. Equipar o robô com sensores permitirá a inspeção de estruturas e o monitoramento ambiental, além de abrir uma série de novas aplicações para a plataforma, que pode manter o equilíbrio em ambientes desafiadores.
Fonte da imagem: Justin K. Yim
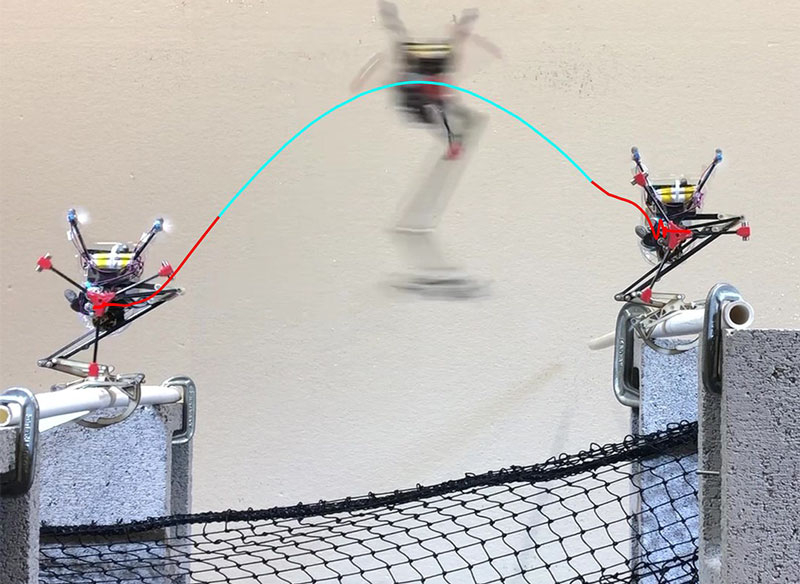
«”Nós nos inspiramos nos esquilos”, disse Justin Yim, que trabalhou no projeto na Universidade da Califórnia, Berkeley, e agora está na Universidade de Illinois em Urbana-Champaign. Os esquilos conseguem compensar sobrevoos e subvoos ao pousar, equilibrando seus corpos de forma a permanecerem no local de onde saltaram. Cientistas tentaram reproduzir mecanismos semelhantes em uma pequena plataforma robótica com uma perna. Para maior confiabilidade, eles o equiparam com uma pegada para que o esquilo robô não caísse do suporte mesmo se perdesse o equilíbrio.
Foi relatado que o robô pousou no pequeno alvo em 25 das 30 tentativas de pular de um fino cano de PVC para outro. Em dois casos ele fez isso perfeitamente, permanecendo em pé, enquanto em outros ele capotou e acabou pendurado nas manoplas. Isso abriu caminho para outra modificação do robô, com o objetivo de criar garras mais fortes, como as garras tenazes dos esquilos. Com o tempo, o robô será capaz de pular de um suporte para outro e fazer isso com a habilidade de um esquilo vivo. No entanto, como apontam os pesquisadores, ainda vai demorar muito para que isso aconteça.
