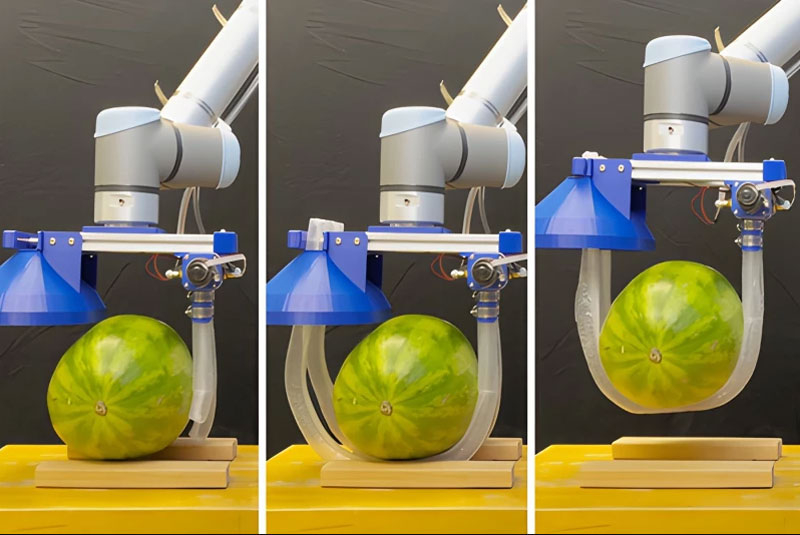
Engenheiros do MIT e de Stanford desenvolveram uma garra robótica inspirada no crescimento de trepadeiras ou lianas. O dispositivo consiste em tubos pneumáticos que, sob pressão de ar, “crescem” a partir da base de um braço robótico, penetram sob ou circundam um objeto e, em seguida, fecham-se do outro lado, formando um circuito fechado. A preensão resultante é ao mesmo tempo forte e delicada, o que possui inúmeras aplicações.
Fonte da imagem: MIT
Um avanço fundamental neste desenvolvimento é a capacidade da garra de fechar o circuito de forma independente, combinando as vantagens de manipuladores abertos (para posicionamento) e fechados (para preensão segura). Garras flexíveis semelhantes a cipós já haviam sido demonstradas anteriormente, mas esta é a primeira vez que uma garra simples e confiável é proposta, conforme relatado pelos cientistas na última edição da Science Advances.
A garra robótica demonstra grande versatilidade ao manusear objetos de formatos e pesos variados. Durante os testes, ela levantou com sucesso objetos frágeis, como um vaso de vidro, objetos pesados e de formato irregular, como uma melancia ou um feixe de barras de metal, e objetos em espaços confinados de difícil manuseio. Particularmente impressionante foi sua capacidade de levantar delicadamente corpos humanos (no vídeo, em 7:30), o que envolveu a inserção de tubos sob o corpo do paciente para garantir o máximo conforto.
VÍDEO
Trabalhar com pacientes é um foco essencial para os desenvolvedores ao projetar essas garras. Essa é considerada a principal aplicação para manipuladores semelhantes a cipós. Cuidar constantemente de pacientes idosos e acamados é uma das tarefas de assistência mais desafiadoras. Esses robôs podem aliviar significativamente o esforço físico da equipe, ao mesmo tempo que melhoram o conforto do paciente: as garras macias que oferecem seguram o corpo humano com segurança e delicadeza.