
A empresa alemã Festo anunciou a criação de um robô voador semelhante a uma abelha. Como as abelhas comuns, as abelhas robôs foram ensinadas a voar em enxame, sem colidir umas com as outras ou com obstáculos. A empresa acredita que o trabalho nesses projetos trará muitas novidades para a robótica e nos permitirá pegar emprestadas muitas soluções de trabalho da natureza.

Fonte da imagem: Festo
A principal atividade da Festo é a produção de equipamentos industriais. Há cerca de 15 anos, a divisão de design da empresa começou a estudar e criar mecanismos biônicos. Os desenvolvedores têm uma formiga-robô, uma libélula-robô, uma borboleta-robô, uma aranha-robô, uma raposa voadora e algo mais. Usando esses mecanismos como exemplo, os engenheiros estudaram e adaptaram a eles as características de movimento e voo dos seres vivos. Robopbee foi o desenvolvimento mais recente, durante o qual o mecanismo de vôo em enxame foi implementado pela primeira vez.
O design da abelha robótica BionicBee na forma de um ornitóptero (máquina) com duas asas batendo foi auxiliado pelo design de IA baseado em algoritmos generativos. Com isso, foi possível simplificar ao máximo o projeto. O peso do BionicBee era de 34 gramas, com comprimento de corpo de 22 cm e envergadura de 24 cm. A frequência de oscilação pode variar de 15 a 20 vezes por segundo. Este trabalho é realizado por um motor elétrico sem escovas. Separadamente, três servos na base de cada asa alteram sua geometria para criar sustentação no momento certo e no lugar certo.
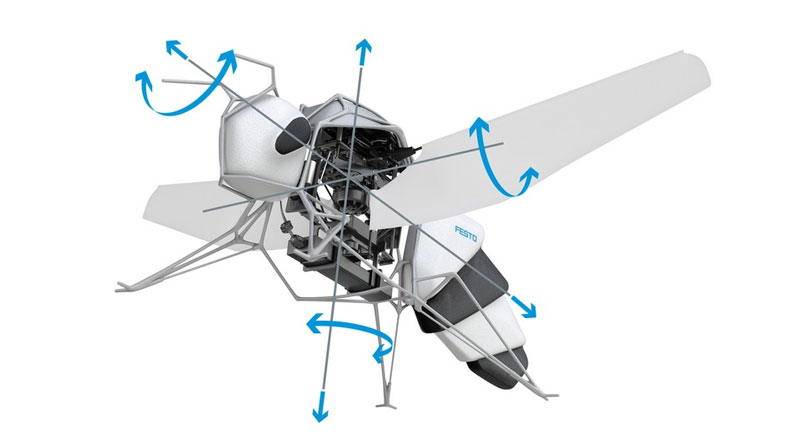
Ao ajustar as inclinações e a geometria das asas, os engenheiros fazem a abelha-robô voar para frente, fazer curvas em ambas as direções ou circular no local e também alterar sua altitude de vôo. Na verdade, a trajetória exata do vôo é definida pelo computador central e, como todas as abelhas-robôs são criadas manualmente e possuem características variadas, cada uma delas passa por autocalibração. Depois de calibradas, as abelhas robóticas podem ser controladas como unidades unificadas, sem a preocupação de que uma seja mais pesada, outra mais leve e a terceira tenha asas ligeiramente diferentes.

O sistema de voo de abelhas robóticas em um enxame é baseado em um sistema de farol de banda larga (UWB). Existem dois níveis de faróis instalados em uma sala especial, usando os carimbos de data e hora com os quais as abelhas robóticas determinam seu lugar no espaço e no enxame. O sistema leva em consideração muitos fatores, incluindo a turbulência causada pelo bater das asas dos vizinhos do enxame. Para os engenheiros da Festo, esta foi uma experiência valiosa na criação de uma unidade voadora robótica e na organização do voo coordenado de um grupo dessas unidades. Algum dia esta experiência será útil para o desenvolvimento de máquinas biônicas e de enxameação ainda mais avançadas.