
A Nvidia revelou um conjunto de novos modelos de IA, bibliotecas e outras ferramentas projetadas para processar informações do mundo externo — ferramentas que podem ser úteis para desenvolvedores de robótica.







Fonte da imagem: nvidia.com
O novo recurso mais notável é o modelo de visão computacional Cosmos Reason, com 7 bilhões de parâmetros, projetado para robôs e outras máquinas de IA. Ele permitirá que robôs e outras máquinas raciocinem com base em sua memória e conhecimento de física, e planejem suas ações.
O Cosmos Transfer-2 foi projetado para gerar cenas sintéticas em simulações 3D; a empresa também exibiu uma versão aprimorada do primeiro Cosmos Transfers, otimizada para rodar mais rápido. Esses modelos são projetados para criar matrizes de dados de treinamento sintéticos — texto, imagens e vídeos — que podem ser usados para treinar robôs e outras máquinas de IA.
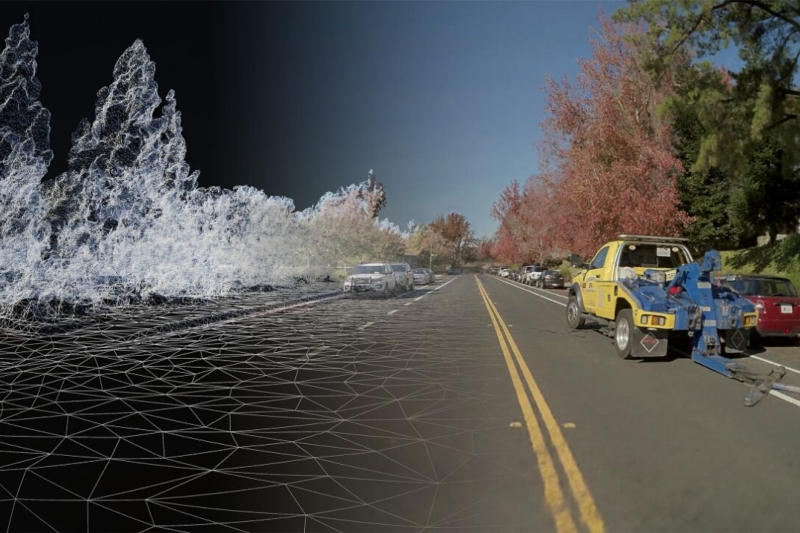
A Nvidia introduziu novas bibliotecas para reconstrução neural, incluindo inpainting — modelagem 3D do mundo real com base em dados de sensores. Esse recurso está sendo integrado ao simulador CARLA de código aberto que os desenvolvedores já utilizam. Uma atualização do Omniverse SDK foi lançada, bem como soluções de servidores locais e em nuvem para cargas de trabalho de robótica.