
Pilotos automáticos e outros veículos robóticos aprendem a avaliar melhor e mais profundamente a situação do trânsito do que um motorista humano. Também é auxiliado por tecnologias para detectar objetos fora da linha de visão. No entanto, das muitas tecnologias para renderização de objetos ao virar da esquina, ainda não houve uma maneira de obter uma imagem em alta resolução. Cientistas do Instituto de Tecnologia da Califórnia preencheram essa lacuna propondo uma nova tecnologia UNCOVER.
Fonte da imagem: Caltech
Tradicionalmente, você pode olhar “ao virar da esquina” se analisar na linha de visão a luz refletida de outros objetos, por exemplo, de paredes. Como a luz de tais objetos é espalhada, uma imagem mais ou menos completa pode ser coletada usando algoritmos de IA. Mas se houver uma fonte pontual de luz perto do alvo desejado – estrela guia (estrela guia), o objeto oculto poderá ser considerado com muito mais detalhes.
A luz de uma fonte pontual permite calcular as frentes de onda da luz refletida pelas paredes e usar essas informações para calcular o fluxo de luz do objeto oculto observado. O problema é que em condições normais de tráfego é impossível destacar objetos ocultos. Caso contrário, cada pedestre e cada carro na rua teria que receber sua própria “estrela guia”.
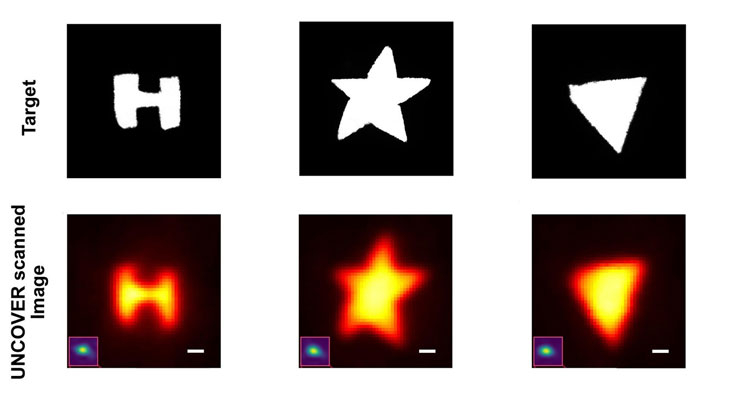
A tecnologia UNCOVER permite que você use o próprio objeto oculto como uma estrela guia. No experimento, os cientistas mostraram a capacidade de distinguir símbolos complexos na forma de um asterisco, formas geométricas e letras que estão fora da linha de visão. A tecnologia proposta, os cientistas têm certeza, ajudará a melhorar os pilotos automáticos nas ruas das cidades e rovers em planetas distantes. O rover não precisará atravessar obstáculos formidáveis para inspecionar objetos escondidos atrás deles. Se houver luz ao redor, ele obterá uma imagem além da linha de visão.